Real-to-Sim Pipeline
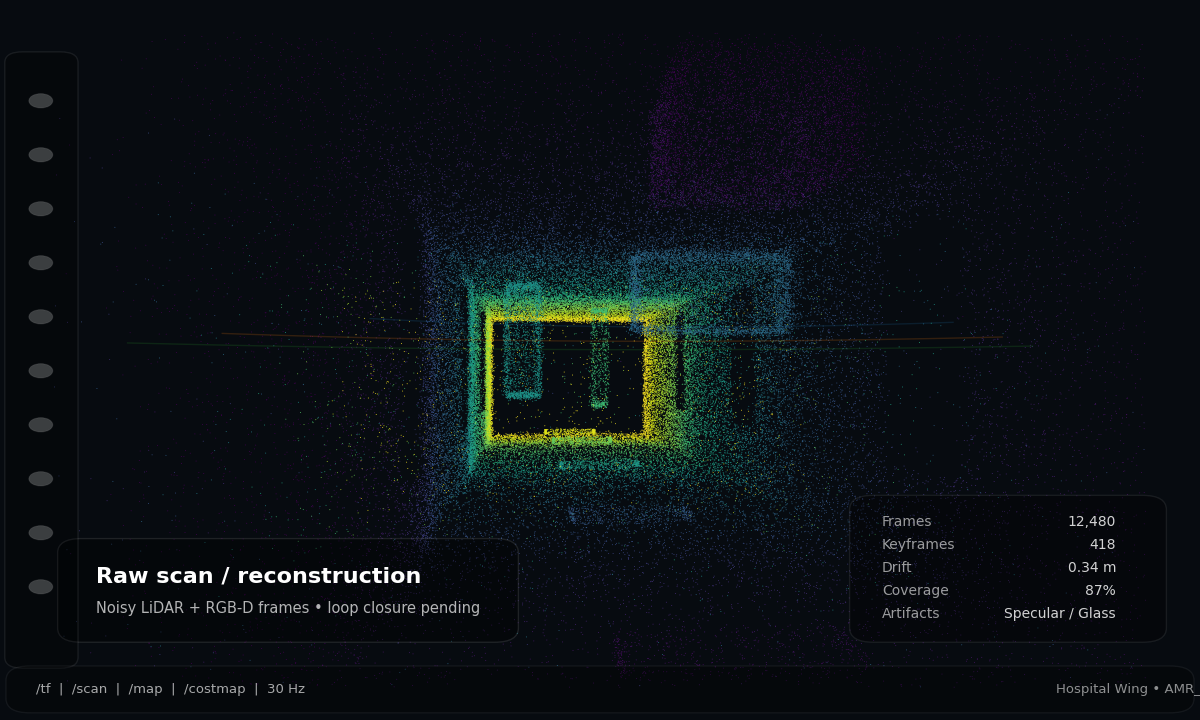
An automated pipeline converting real-world facility scans into semantic, physics-enabled simulation environments (USD) for high-fidelity robot validation.
Demo clip available on request. Visuals shown are AI-generated stand-ins because I can't share the original customer assets.
Overview
Developed a toolchain to ingest LiDAR/RGB scans of customer facilities, segment them semantically, and auto-generate USD (Universal Scene Description) assets for NVIDIA Isaac Sim.
Problem
Manually recreating customer environments in 3D tools took 2-3 weeks per site. This bottleneck prevented site-specific validation before deployment, leading to costly on-site debugging.
Pipeline Architecture
End-to-end flow from raw scan data to simulation-ready USD stage.
Code Snippet: USD Mesh Generation
Python script using the Pixar USD API to define mesh topology and apply physics colliders programmatically.
from pxr import Usd, UsdGeom, UsdPhysics, Sdf
def create_wall_mesh(stage, path, points, normals):
# Define mesh prim
mesh = UsdGeom.Mesh.Define(stage, path)
# Set vertex data
mesh.CreatePointsAttr(points)
mesh.CreateNormalsAttr(normals)
# Add collision API
UsdPhysics.CollisionAPI.Apply(mesh.GetPrim())
# Define material binding
UsdShade.MaterialBindingAPI.Apply(mesh.GetPrim())
return mesh
# Batch process segmented point clouds
for segment in segments:
create_wall_mesh(stage, f"/World/Walls/{segment.id}", segment.points, segment.normals)
Approach
- Decimation: Automated downsampling of dense point clouds (50M+ points) to manageable meshes while preserving geometric fidelity for Nav2.
- Semantic Labeling: Used plane fitting (RANSAC) to extract floors and walls, separating them into distinct USD layers.
- Physics Integration: Automatically applied rigid body colliders and friction materials to floor surfaces.
Media & Artifacts

Results
- Reduced environment generation time from 2 weeks to 3 days.
- Enabled site-specific validation of navigation parameters before the robot arrived on site.
- Found 3 critical navigation failures in narrow corridors using the digital twin prior to deployment.