Simulation Validation CI
A continuous integration pipeline that automatically validates autonomy stacks against hundreds of simulation scenarios before every release, ensuring no regressions reach the hardware.
Demo clip available on request. Visuals shown are AI-generated stand-ins because I can't share the original customer assets.
Overview
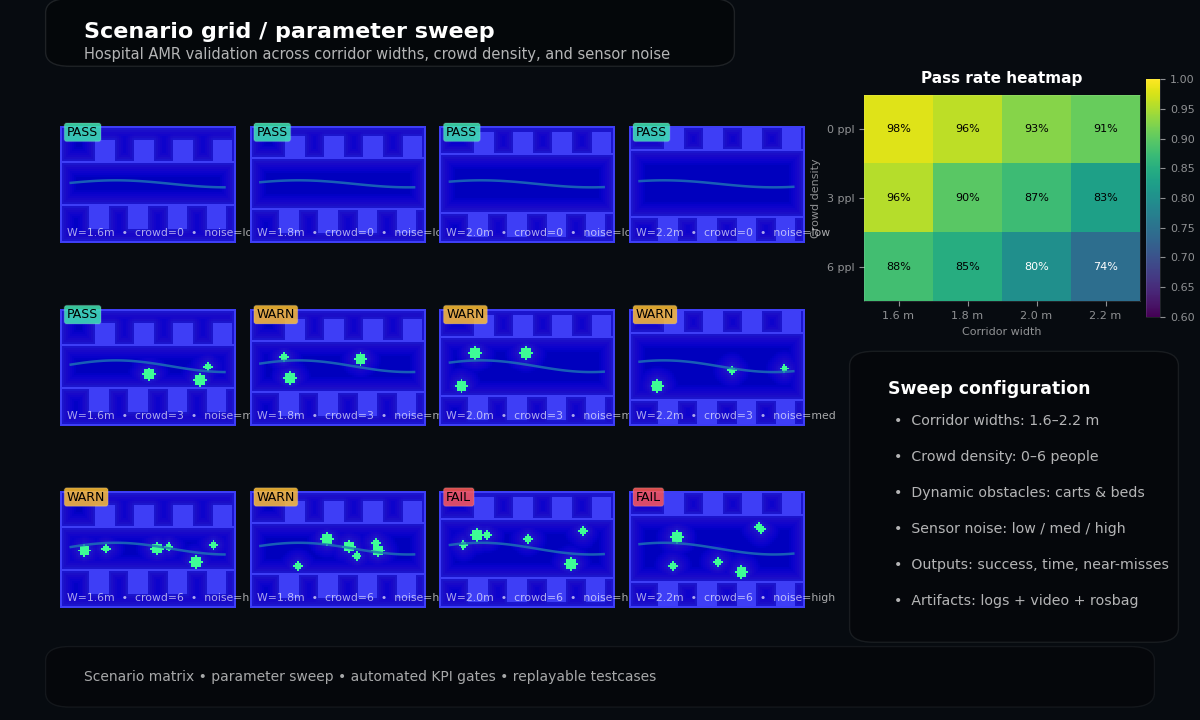
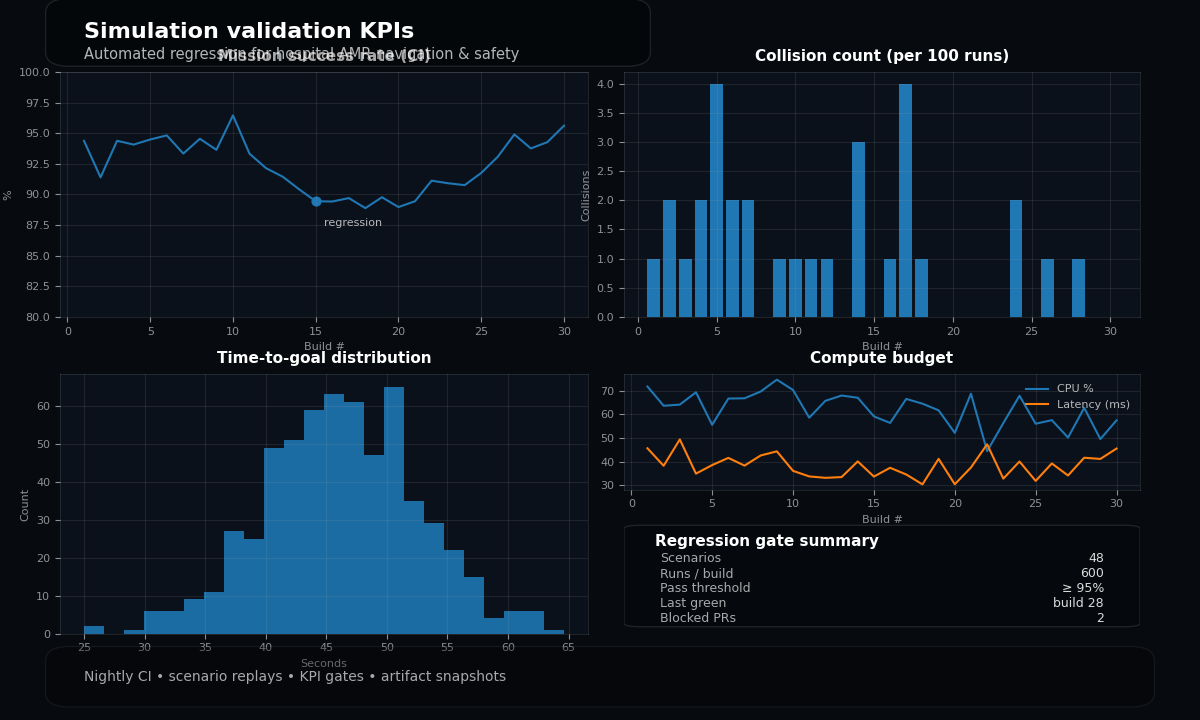
Built a scalable testing infrastructure that spins up headless simulation containers (Isaac Sim / Gazebo) to run mission scenarios, track KPIs (success rate, collision counts, path efficiency), and report results to GitHub.
Problem
Manual regression testing on physical robots was slow (days per release) and inconsistent. Bugs in edge cases (e.g., narrow corridor passing) often slipped through to deployment.
Pipeline Architecture
From code commit to validated release report.
Code Implementation: Test Runner
Python-based test runner that orchestrates ROS 2 launch files and monitors goal success criteria.
import rclpy
from navigation_interfaces.action import NavigateToPose
def run_scenario(scenario_config):
# Launch simulation headless
sim_proc = launch_simulation(scenario_config['world'])
# Send navigation goal
goal_handle = nav_client.send_goal(scenario_config['target_pose'])
# Monitor metrics
metrics = {
'collisions': 0,
'time_taken': 0.0,
'success': False
}
while not goal_handle.done():
if check_collision():
metrics['collisions'] += 1
return metrics
name: Simulation Validation
on: [push]
jobs:
validate:
runs-on: self-hosted-gpu-runner
steps:
- uses: actions/checkout@v2
- name: Build Container
run: docker build -t autonomy-stack .
- name: Run Scenarios
run: python3 run_tests.py --suite=full_regression
- name: Upload Artifacts
uses: actions/upload-artifact@v2
with:
name: test-results
path: results/
Media & Artifacts
Results
- Caught 95%+ of regressions (e.g., config drifts, logic errors) before they reached hardware.
- Reduced field testing time by 60%, allowing engineers to focus on novel feature development.
- Established a "green build" culture where every merge is guaranteed to be deployable.